电池系统管理|离散型卡尔曼滤波算法基础
状态方程与观测输出方程
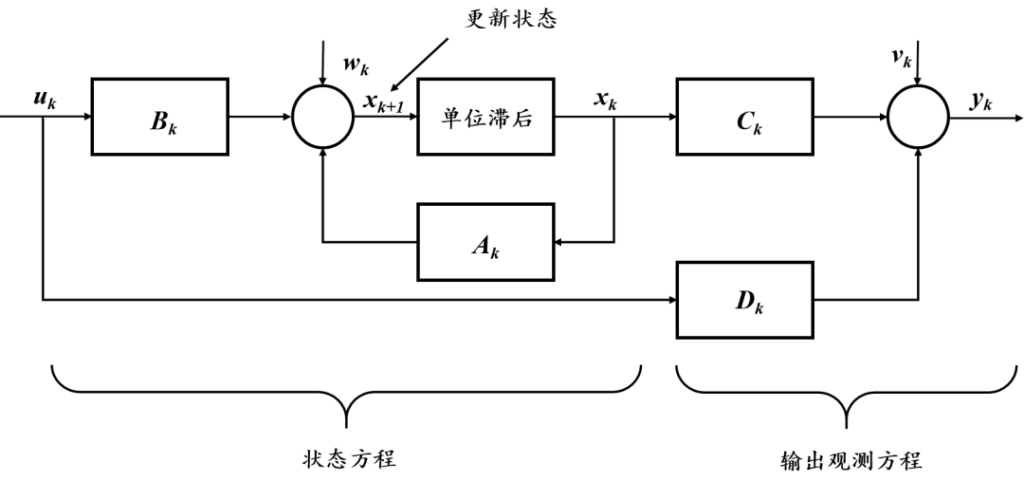
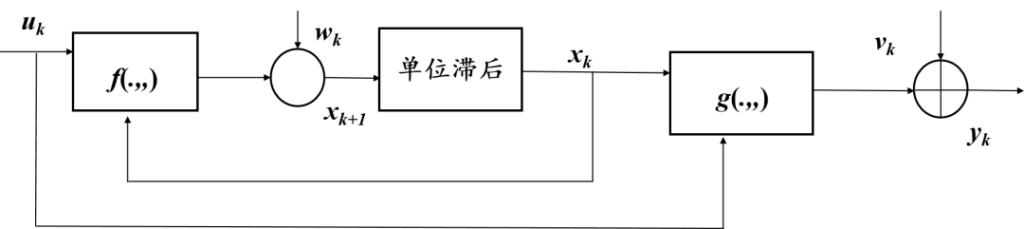
x为系统的状态方程,是系统的输出观测方程。上式中是系统的状态向量,是系统的输入向量,是系统的随机噪声,由于系统建模的不精确或未知输入造成的噪声与是传感器引起的观测噪声。四个系数矩阵可以完整描述系统。若将上式描述成框图,如下:
有了状态空间方程后可以使用卡尔曼滤波算法实时对当前状态做最优估计。同时使用卡尔曼滤波算法是要做两个假定,假定两种噪声是互不相关的高斯白噪声。
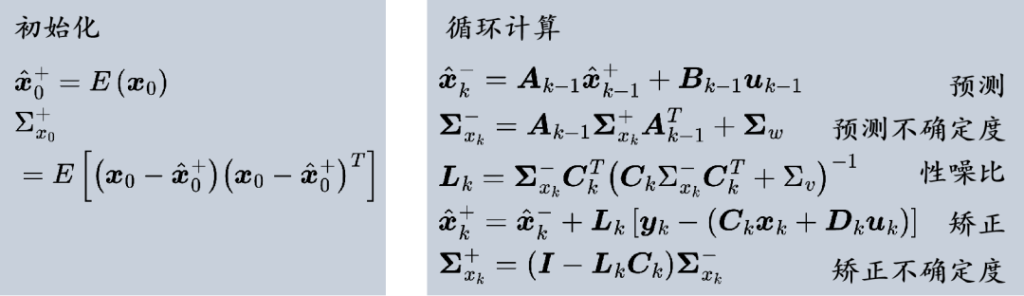
初始化过程中首先得到系统的初始状态与系统的方差阵,完后循环计算。具体过程如下
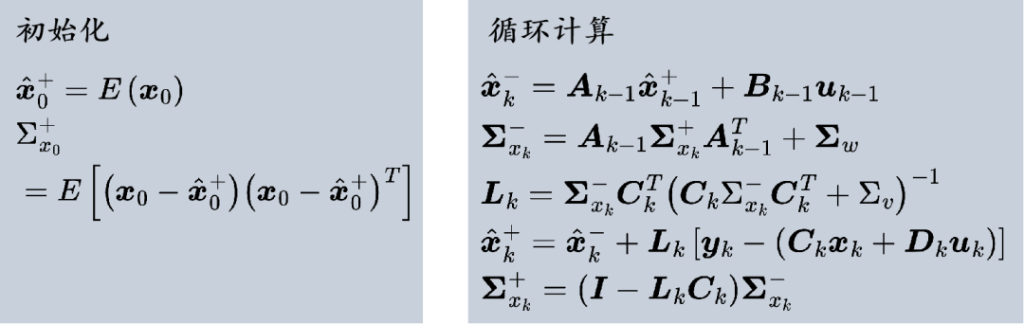
卡尔曼滤波算法的核心是高效的递推公式。右图m表示状态向量的误差向量,该值越大表示估计值的不确定度越低。该离散卡尔曼滤波算法可以拆分为两步,如下:
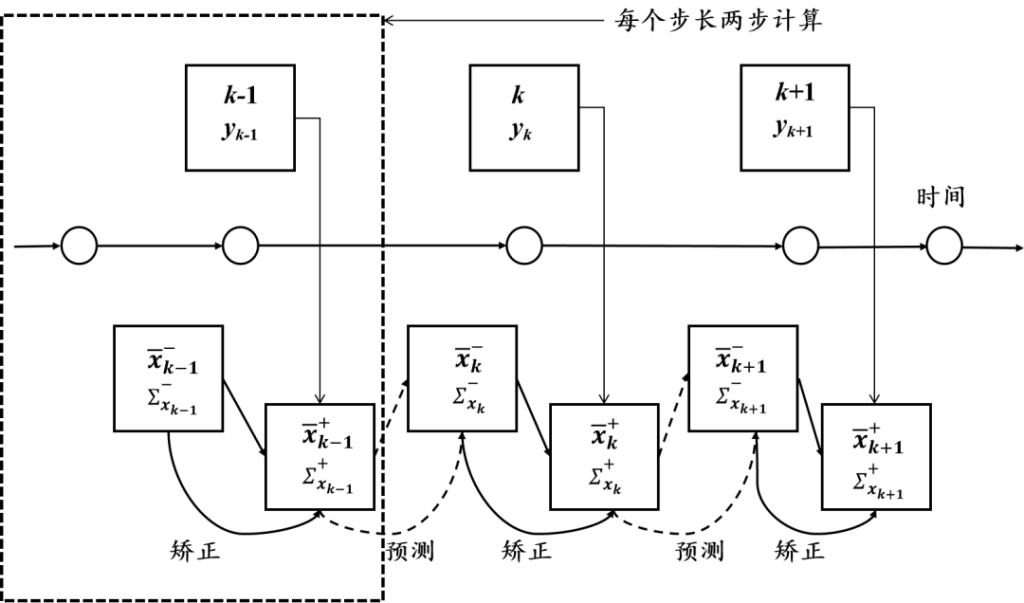
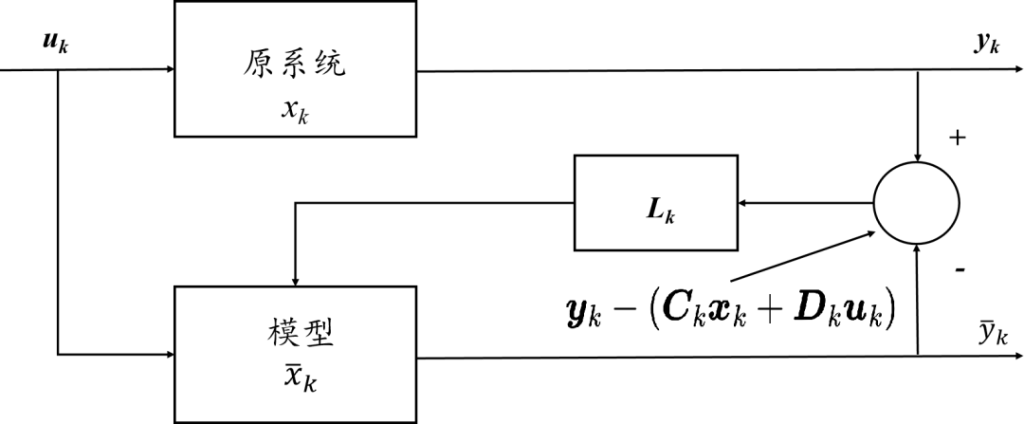
在每一次计算步长内,都会存在两个步骤,先预测后矫正。其中为卡尔曼增益,如果的不确定性比较大,那么卡尔曼增益随之变大,给系统一个比较大的调整力度;数值比较小,值确定度高,系统调整度较小。同样,式中数值越大,则导致数值越小,意味输出观测的调整尽量小;若传感器精确,测量误差小,则Lk比较大。下图显示了原系统与模型系统之间的修正过程。
卡尔曼滤波原理
扩展卡尔曼滤波算法
对扩展卡尔曼滤波做线性化处理,即在非线性函数处做一阶线性展开。将f和g在当前时间点做一阶泰勒展开,后重新定义A与C
扩展卡尔曼滤波与标准卡尔曼滤波相比,只是在状态矩阵和输出矩阵的差异上,其他关键思想与标准卡尔曼滤波算法是相同的。作为非线性系统内部状态的估计算法,扩展卡尔曼滤波算法只是其中的种解决方案,其他一些改进的方案可以提供更好的估计精度(如UKF等算法)。
卡尔曼滤波算法估计SOC
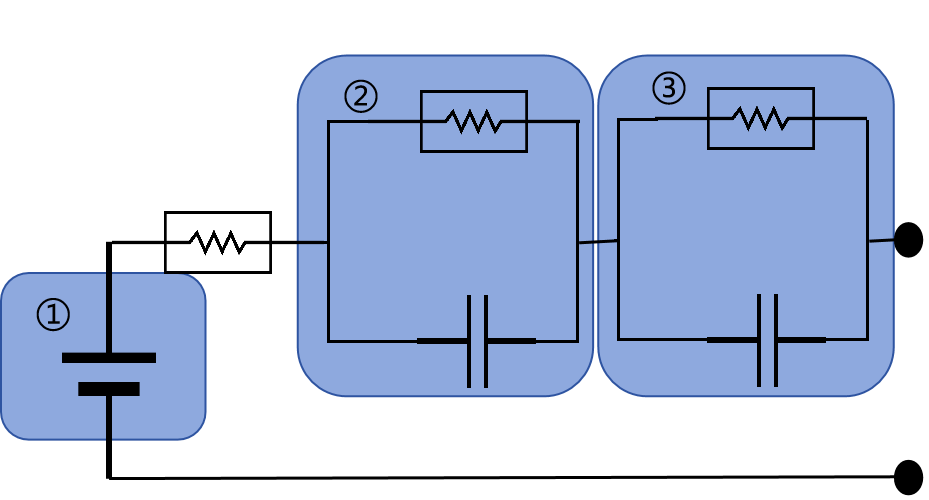
首先将等效电路模型方程转变为状态空间方程。对于二阶等效电路,存在三个储能器件,因此状态矩阵中存在三个变量,三个状态量分别是,两个电容的电压,空间变量表示为

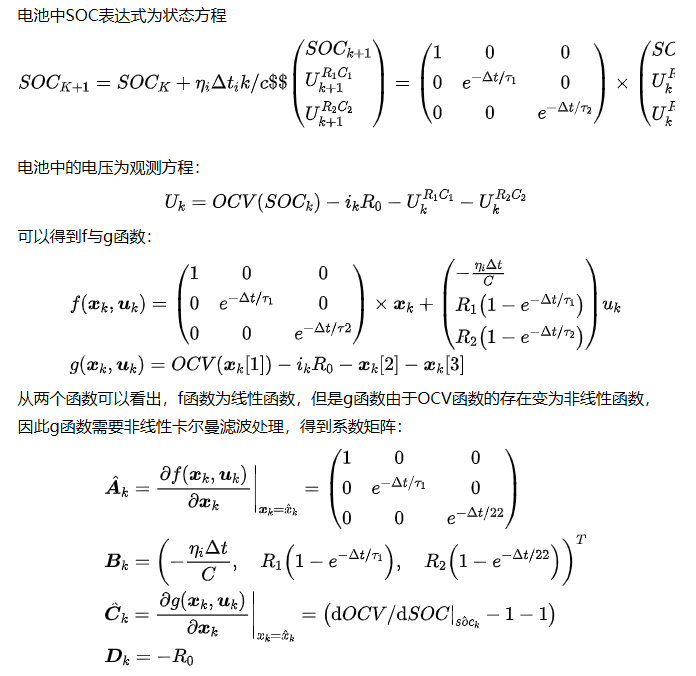
得到系数矩阵后则按照标准卡尔曼滤波算法进行计算。
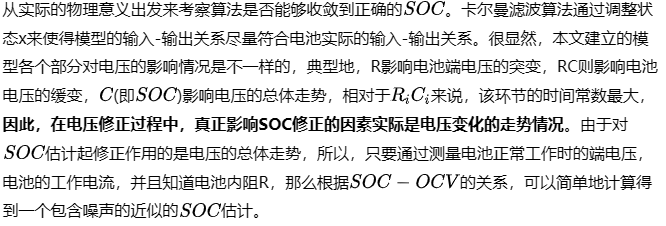
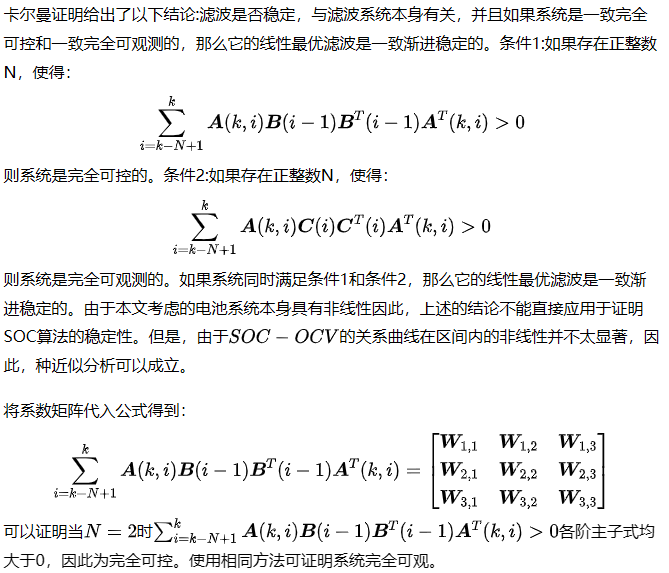
卡尔曼滤波算法的稳定性及意义
卡尔曼滤波的物理意义